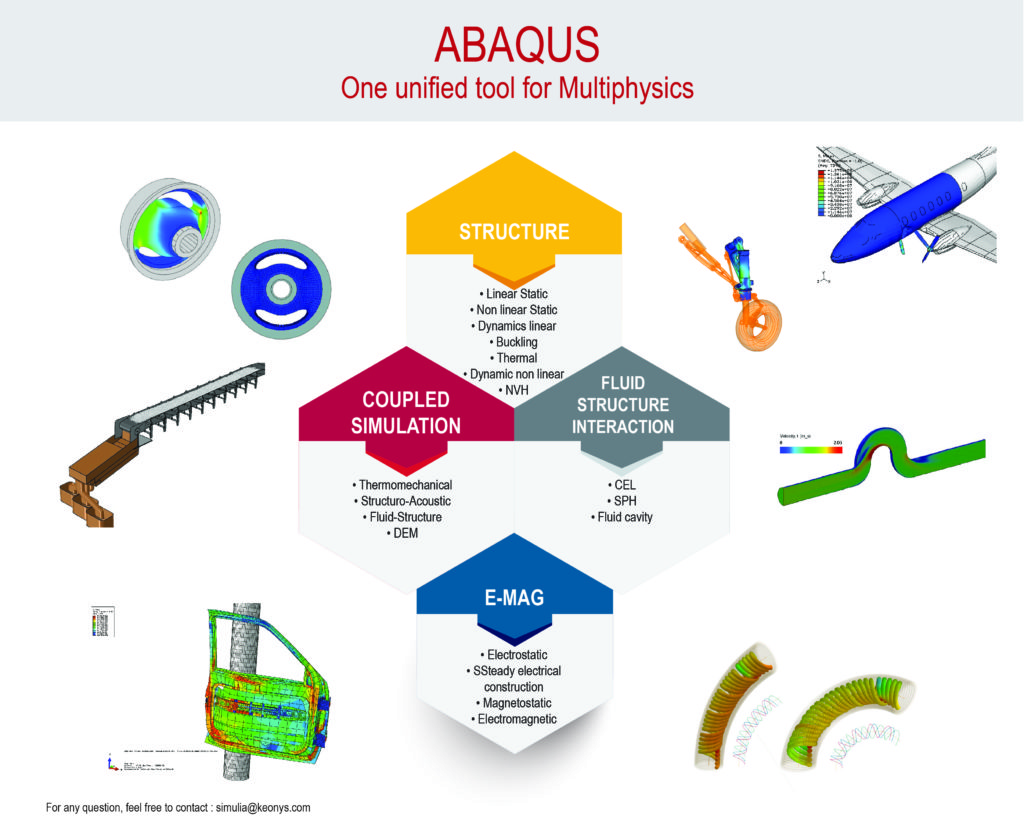
Finite Element Learning Essentials: Implicit vs. Explicit Finite Element Algorithms
Introduction: For finite element learning, the most critical aspect is not the constitutive equations or yield criteria, but understanding solution algorithms. Based on long-term learning experience and academic visits in the United States, this article provides a basic, original summary driven by personal interest.
The key distinction between implicit and explicit finite elements lies in whether iteration is used and whether all physical quantities are obtained simultaneously at a given time. An implicit finite element refers to methods that use implicit iteration to solve equilibrium equations (for displacement, velocity, and acceleration), regardless of whether implicit or explicit methods (forward or backward Euler) are used to solve constitutive equations (for stress and strain). An explicit finite element uses explicit time integration for solving.
Constitutive equations are typically solved using forward or backward Euler algorithms:
Equilibrium equations are solved using either implicit or explicit finite element algorithms:
The stiffness equation is derived from the variational form of stress equilibrium equations and boundary conditions. Implicit solving requires introducing a Jacobian matrix (ensuring quadratic convergence, affecting computation speed but not numerical accuracy; K is also called the Jacobian), which is updated in real-time and is a function of stress, strain, and state variables (e.g., damage internal variables) at time N+1.
Implicit methods are robust and ensure calculation accuracy but are computationally expensive—each iteration requires inverting the stiffness matrix. They also face numerical convergence issues, which are addressed using methods like arc-length methods or viscous damping (the latter being particularly effective in practice).
Explicit methods use time integration: nodal displacements at time are derived from stress and strain at integration points at, without iterative solving or a Jacobian matrix (the partial derivative of stress with respect to strain). If a Jacobian is needed, it is an approximate continuous Jacobian derived from the constitutive model rather than the stiffness equation.
For explicit algorithms, stress and strain at element Gauss points can be solved using forward or backward Euler methods, and nodal displacements are obtained via time integration. Importantly, the iterative solution of displacement in equilibrium equations is independent of solving stress and strain in constitutive equations—a common misconception conflates forward/backward Euler with explicit/implicit methods, which is incorrect.
Widely used explicit algorithms include the Newmark method and Wilson-θ method. Adjusting two parameters in the Newmark method enables implicit or explicit solving:
A common misunderstanding is that only explicit algorithms can solve dynamic problems, while implicit methods are limited to quasi-static problems (e.g., low-speed impact). However, Abaqus uses the unconditionally stable implicit difference algorithm proposed by Hilber, Hughes (University of Texas at Austin), and Taylor (UC Berkeley) for implicit dynamic solving, suitable for low-speed dynamics—though it is inefficient for damped systems.
The Newmark method with \(\alpha = 0.5\) and \(\beta = 0\) is more efficient for dynamic problems but is conditionally stable: excessive time increments cause displacement oscillations due to numerical instability. Time increments must be very small (dependent on wave speed, elastic modulus, and minimum element size), making explicit algorithms computationally intensive.
Explicit methods are versatile: they handle rate-dependent deformation and stress, solve steady-state problems (e.g., dynamic relaxation with damping matrices in the stiffness equation for static steady states like gravity-induced initial stress), and resolve quasi-static shear locking issues by introducing mass matrices via central differences.
Notably, time integration algorithms often use lumped diagonal mass matrices (instead of consistent mass matrices) to improve efficiency. In practice:
For inherently viscous materials, viscoplastic models differ fundamentally from elastoplastic models: they often violate consistency conditions (unlike high-temperature elastoplastic softening, which may still satisfy yield criteria). Thus, stress at \(N+1\) does not need to return to the yield surface, making viscoplastic models overstress models solvable by both explicit and implicit algorithms.
Rate-dependent constitutive models address dynamic strain localization in high-speed impact, explosion, or ballistics simulations (where equilibrium equations lose hyperbolicity for dynamic problems or ellipticity for static problems). They mitigate mesh size effects by introducing appropriate damping hysteresis.
For large deformation (finite deformation) problems, Cauchy stress rates and velocity gradients (including objective symmetric deformation rate \(\text{D}\) and non-objective antisymmetric spin tensor \(\text{W}\)) are non-objective. To account for rigid-body rotations (e.g., in pure shear), true stress and strain are solved in a co-rotational frame:
Abaqus automatically handles rotations for large deformation problems.
For highly complex coupled problems (e.g., thermo-hydro-mechanical coupling) requiring solutions for displacement, pressure, and temperature, pure implicit or explicit algorithms often struggle with convergence or accuracy. A mixed implicit-explicit partitioning method is used, splitting stiffness and damping matrices to apply different algorithms in the same domain, improving efficiency, accuracy, stability, and convergence.
Source: Liu Pengfei’s Blog, Science Network
For more information, please contact Teacher Tian at 15029941570.
we specialize in CAE finite element calculation and simulation, virtual prototyping and simulation testing, and product design optimization for enterprises and institutions.


Copyright © 2025.Boye Engineering Technology All rights reserved. Yue ICP17017756Num-1